PHI-4A-2
ein mechanischer Analog-Rechner zur Koppelnavigation und Ablagebestimmung,
eingesetzt im Starfighter F-104G.

Rechnerisch wurde die tatsächliche Position durch Integration der Fluggeschwindigkeit ermittelt ("Koppelnavigation") und dann die Differenz zum gewählten Zielort errechnet und mit Winkel und Entfernung angezeigt ("Ablage")
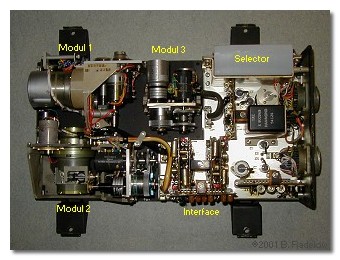
In Modul 2a wird die aktuelle Geschwindigkeit in X-/Y-Komponenten dargestellt, in Modul 2b der Wind "subtrahiert" und daraus die aktuelle Position integriert.
In Modul 3 wird die Differenz zwischen aktueller Position und Zielposition ermittelt, die im Demultiplexer ("Selector") ausgewählt wurde.
Nachgeschaltete Interfaces erzeugen die Signale für den PHI (Position and Homing Indicator).

Modul 1 enthält eine Scheibe, die konstant mit 1 Umdrehung pro Sekunde gedreht wird. Über einen unten erklärten Mechanismus wird die Umdrehungsgeschwindigkeit proportional zur Fluggeschwindigkeit gestaltet.
Modul 2 trennt die Fluggeschwindigkeit in Nord/Süd- und Ost/West-Komponenten (hinten), zieht die Windgeschwindigkeiten ab und integriert die Werte (vorne) - und ermittelt so die Position des Flugzeugs.
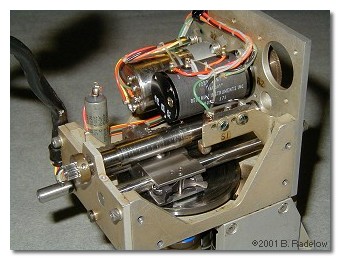
Der Schlitten enthält eine Kugel, die die Drehung der Scheibe auf die Stahlachse darüber überträgt. Steht der Schlitten in der Mitte, dreht sich die Achse gar nicht; steht er ganz links, dreht sich die Achse sehr schnell.
Das Zahnrädchen links ist der "Ausgang" des Moduls; hier geht es weiter nach Modul 2. Die Umdrehungsgeschwindigkeit ist der Fluggeschwindigkeit proportional (bei Vmax ca. 10 U/sec).




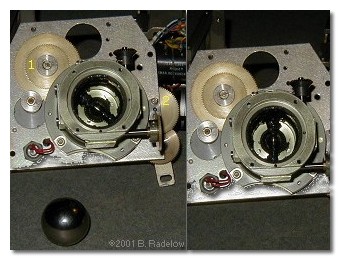
Angetrieben wird die Walze durch Modul 1 über die stark untersetzenden Zahnräder (2), ausgerichtet wird sie von Zahnrädern (1) eines Servomotors, der von einem (externen) Magnet-Kreiselkompass gestellt wird.
Das linke Bild entspricht einem Flug nach Nordost (45°) - beide Abnehmer-Räder werden bewegt (sin 45° und cos 45°).
Das rechte Bild entspricht einem Flug genau nach Ost - nur der rechte Abnehmer wird bewegt (sin 90°), der untere bleibt still (cos 90°)

Zuerst wird in (4) die Umdrehung noch einmal stark untersetzt (mechanisches Getriebe), dann wird in (5) mit einer Feder ein Endanschlag abgefangen.
(1) ist der Käfig eines Differentialgetriebes, das das Wendel-Potentiometer (6) antreibt - dies stellt den "Ausgang" dar. Am Differential wird von der Flugstrecke (2) noch die Windkomponente (3) abgezogen. Dieses Zahnrad (3) wird von einem eigenen Stellmotor (siehe unteres Bild) angetrieben.

(1) ist das Ritzel, das sich proportional zur Windgeschwindigkeit dreht.
Die untere Hälfte ist identisch mit der oberen; eine berechnet die Nord/Süd-Koordinate, die andere die Ost/West-Koordinate.
Ein fast identisches Modul 3 berechnet die Differenz zwischen Standort und ausgewähltem Zielort.



